
특수목적용 로봇 개발
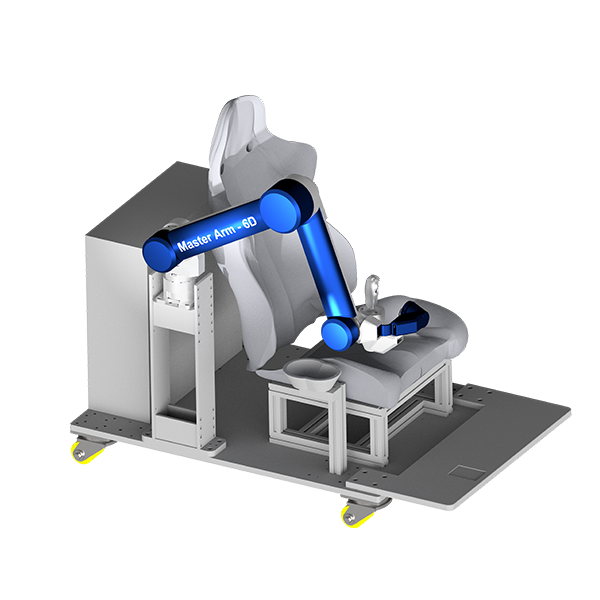
Master-Slave Remote Control System
다양한 산업용 및 특수목적 로봇시스템에
적용성이 확보된 6-DOF 원격제어 마스터 시스템



원격 제어 시연
Features
6-DOF Master-arm
- 3차원 공간상의 모든 위치 및 자세 표현
Force Feedback Reaction
- 슬레이브 로봇에 충격 및 작업 상황 감지
Real-Scale Control
Function
다양한 로봇과 연동
가상환경 연동 작업 시뮬레이션
Application
메니퓰레이터에 연결하여 원격 제어(Master-Slave)
VR기반 실제 현장 작업 모의 시뮬레이터
㈜코어로보틱스
대표자 : 이명진 ㅣ 사업자등록번호 : 124-81-71983 ㅣ 대표전화 : 02-525-8660 ㅣ 팩스 : 02-525-8662
본사 : 서울특별시 서초구 효령로34길 4, 2층 202호 (방배동, 프린스효령빌딩)
공장 : 부산광역시 기장군 장안읍 의과학6로 17
Copyright ⓒCORE ROBOTICS All rights reserved.
