
Special purpose robots
Facility Decommissioning
A remote dismantling robot that is remotely controlled and performs dismantling work (cutting and transport)
when dismantling nuclear power plants and hazardous facilities.


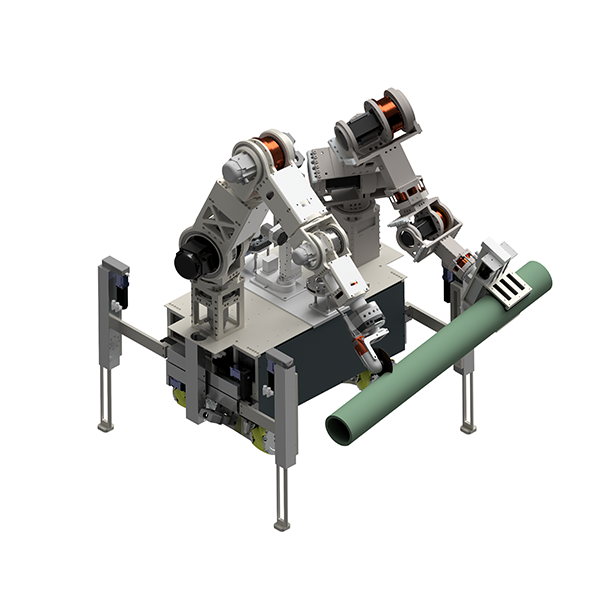
7-DOF Mobile Robot
Grinder cutting
Plasma cutting
Features
7-DOF Dual-arm Manipulator
- 7 Degrees of Freedom
- Dual-arm Collaboration
- 100kg Payload
Precision Robot Control
- Repeatability : ±0.1mm
- Real-time(1ms) Control
Optimization of Work Environment
- Compact Mobile Platform
- Auto Tool Changing System
- Free mobility based on wheel mechanism
Function
Disc saw cutting
Plasma cutter cutting
Pipe and vessel handling grippers
Remote work monitoring
Application
Cutting and dismantling of structures in high radiation areas, hot cell remote work
CORE ROBOTICS Co., Ltd.
CEO : Lee Myeong Jin ㅣ Company Registration Number : 124-81-71983 ㅣ Contact : 02-525-8660 ㅣ Fax : 02-525-8662
Head Office : 2F, 202, 4, Hyoryeong-ro 34-gil, Seocho-gu, Seoul, Republic of Korea
Factory : 17, Uigwahak 6-ro, Jangan-eup, Gijang-gun, Busan, Republic of Korea
Copyright ⓒCORE ROBOTICS All rights reserved.
